- Recente
")
Câmera HD Câmera Astra Pro Deepth. 3dof braço robótico. Tela de toque HD de 7 polegadas. 【Selecionar versão】 O Transbot possui a versão Jetson Nano e a versão Raspberry Pi, o Jetson Nano 4
GB Sub é um kit de desenvolvedor altamente consistente baseado no módulo oficial de núcleo do Jetson Nano 4 GB, a única diferença é que o Sub-Moteiro do Yahboom Jetson Nano 4
GB vem com a memória 16
G-EMMC , não há necessidade de usar o TF separadamente. 【Com base no kit profissional de projeto programável do ROS】 O Transbot usa as caixas de ferramentas RVIZ, MOVELT e QT no sistema operacional robô para realizar o controle conjunto da simulação robótica do Mov
Elt e da máquina real. Combinado com a câmera Lidar e Deefth, realiza navegação em mapeamento 2
D3
D, planejamento de caminhos e outras funções, inicia a jornada de aprendizado da programação do ROS com transbot. 【RTAB-VSlam 3
D Visual Mapping Navigation】 Câmera Astra Pro 3
D fornecida pela versão III suporta a tecnologia de navegação de mapeamento 3
D (RTAB) contendo visão pura e fusão de radar visual. O robô transbot pode navegar, evitar obstáculos e realocação global no mapa 3
D e obter rapidamente dados de imagem, como mapa de profundidade da câmera, mapa de cores e esqueleto através da API correspondente., Com base no algoritmo de filtro KCF relacionado à imagem, qualquer alvo seguido em a imagem pode ser selecionada. Início do mundo 3
D. 【Combinação de funções da IA】 O robô integra uma riqueza de funções de IA, como patrulha inteligente, guarda de radar e rastreamento, agarro flexível de 3-DOF de manipulador, navegação de ponto fixo, direção automática, reconhecimento de cores e rastreamento, reconhecimento de tags e realidade Aprimoramento, embelezamento visual de imagem, detecção de rosto, navegação por mapeamento de lidar e prevenção de obstáculos, você receberá o código -fonte aberto fornecido pelo Yahboom para realizar mais possibilidades. 【Controle de interconexão de plataforma cruzada】 O robô pode ser programado ou controlado de quatro maneiras, ① App de controle remoto móvel integrado a uma variedade de funções de IA, ② Controle de manuseio que pode experimentar os efeitos visuais em tempo real do FPV, ③ Jupyterlab Programação online e ④ Controle profissional do sistema operacional do robô, uma variedade de métodos de controle para atender a diferentes ocasiões, experiência aprofundada da diversão de controlar os robôs (★ NOTA : O aplicativo Yahboom suporta i
OS & Android, Ros Robot App apenas para Android).
Proteção e estilo expirados para o seu dispositivo Evita arranhões no seu i Pad Grip seguro e deslizamento reduzido Moldado para caber perfeitamente com acesso total a todos os botões e

Ele foi projetado com extremidade de cinzel chanfrada polida e alicates de grooving polido para melhorar a função e o desempenho Feito de aço inoxidável de super qualidade, resistente, m

Conectores de serial de 9 pinos masculinos (DB9) em cada extremidade Design de baixo perfil ROHS compatível Com mais de uma década de experiência, sua loja de cabos se dedica a trazer pro

Montagem de Janela para o leitor de cartão Sumup 3 G Pode ser usado como um ponto de ponto de venda ou a estação de ancoragem a ser montada para proteger as janelas do Perspex etc para o

Ajuste apenas para o Mac Book Pro 15 polegadas Modelo A1398 com a versão Retina Exibir sem CDROM Por favor, verifique o número do modelo do seu Mac Book "A1 XXX" na parte inferior do lapto

Este é o Display Port para o cabo HDMI, só pode cobrir o sinal de DP para HDMI Não é um Display Port bidirecional para o adaptador HDMI Conectando o Display Port ao seu computador, lapto

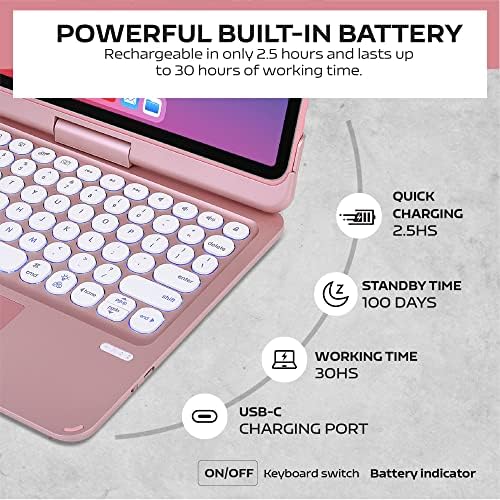
Proteção de sobrecarga Proteção de superaquecimento sobre proteção atual proteção contra curtocircuito Q1 : Quais dispositivos esse 97 WH Power Bank Power? R : Observe que a porta de

Lute contra a sujeira : este protetor de teclado ajuda a proteger o teclado contra migalhas e impressões digitais A escrita não exige que a membrana macia seja removida do teclado...
Apresentando o Unitype da Mobee New para 2021, o Unitype é o estojo principal do teclado para todos os profissionais do i Pad de 11 polegadas e o i Pad Air de 4ª geração de 10,9 polegada

Caso de caixa de caixa PU PUCLO CASA CASA COMBATE COMBATÍVEL COM SAMSUNG GALAXY TAB S8 PLpolegadas 2022 / S7 Fe 124 '' 2021 & Tab S7 PlO caso de proteção pode ser convertido em um supor

Este é o Switch de compartilhamento manual de 4 PORT VGA permite que quatro computadores compartilhem 1 monitor, projetor Estojo de metal blindado completo Fácil de instalar, não é neces

Descrição do item : Peças do laptop Garantia : 90 dias Para garantir que você obtenha as mercadorias certas, verifique seu email de registro após o pagamento...

A transparência visual ultraalta de 99% produz cores vibrantes ? [Força e estabilidade] feitos de termoplásticos de alto grau projetados para durabilidade; O Clear Touch Crystal protege s
![Celicious Silk Mild Anti-Glare Protector Film Compatível com MSI Monitor Optix 27 Mag274 [pacote de 2]](/tmpl/aundro/182140-celicious-silk-mild-anti-glare-protector-film-compativel-com-msi-monitor-optix-27-mag274-pacote-de-2.jpg)
Filme de protetor de tela ultrafino e sedoso, projetado especificamente para o MSI Monitor Optix 27 Mag274 O revestimento antiensino leve melhora a visibilidade da tela na luz ambiente, redu

Antena Omni Outdoor de banda larga com cabo de 30 pés e hardware de montagem Cabo de adaptador de antena externa para Netgear Aircard 781s 782s AT&T Unite Pro Hotspot Frequência : 698960 /

Este adesivo de pele de tampa do protetor da pista de trilha Touch Pad protegerá seu touchpad de laptop a partir de arranhões e danos minimizados Este protetor de capa do touchpad é proje

Dimensões da mochila no nascer do sol da praia : Tamanho geral : 157 H x 11,4 W X 7 Compatível com a maioria dos comprimidos e se encaixa na maioria dos laptops com uma tela de até 15 p

design de embrulho Proteção ao rascunho Garantir de dois pontos para a assembléia de reservatório de dispete e preenchimento Bolha de nivelamento e parafusos ajustáveis...

USB ontheGo⭐ : Conecte e compatível com o seu Cadillac 2020 XT6 transforma as portas USB em portas USB C Conecte os periféricos USB C a dispositivos com portas USB A Isso permite conecta

Tensão de saída primária (VDC) : 42 Corrente de saída (AMPs) : 5 Power máxima de saída (watts) : 240 Tensão de entrada (VAC) : 90 a 305 Frequência de entrada (Hz) : 47 a 63...

? 100% novo e de alta qualidade ? Habilidades e técnicas especiais necessárias para a instalação adequada ? Por favor, verifique o modelo e a imagem antes de comprar 【Abaixo do modelo

【Recursos】 : Design especial e materiais de alta qualidade garantem que o adaptador seja mantido em baixa temperatura para carregar com segurança e certificado pela FCC CE ROHS, focamos

O protetor de tela do Tech Skin Compatível com o Blu Studio X5 Max é projetado especificamente usando a tecnologia precisa de corte a laser para oferecer cobertura máxima de tela A flexib

● Nota : O conector de 6 pinos do produto é um conector em miniatura de 6 pinos, que é menor que o padrão de 6 pinos e tem uma largura de apenas 8 mm Verifique se sua placamãe possui u
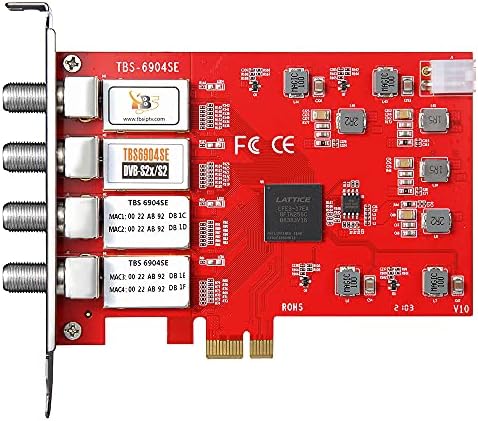
Tuner Quad : Os quatro sintonizadores avançados DVBS2 / S2 X permitem assistir ao canal de TV de um transponder de satélite enquanto grava três outros canais de diferentes transponders de

Descrição do item : Peças do laptop Condição do item : novo Garantia : 90 dias Para garantir que você obtenha as mercadorias certas, verifique seu email de registro após o pagamento..

Mini placa base para módulo de computação 4 adequado para avaliar o Raspberry Pi CM4 ou ser integrado aos produtos finais Conectandose ao módulo de computação 4 Soquete CM4 do padrão

★ Tamanho do organizador eletrônico de viagem : 514 em / 15x24x8 cm ★ Material organizador de eletrônicos : o saco de armazenamento eletrônico é feito de material de tecido oxford cr

As matériasprimas de PC são não tóxicas, não poluição e nãoódio Cada botão é bom, o soquete está desobstruído e toda a máquina é correspondida com precisão Peso leve, resist�

Switch único e sem ferramentas! Instalação instantânea graças a um bloqueio de Ty atencioso e design sem ferramentas, a instalação pode ser feita em algumas etapas simples Basta abrir

O fone de ouvido UH36 oferece muita liberdade com conectividade com fio Ouça sons distintos de ambos os alto falantes no modo de som estéreo Ouça os vocais baixos e altos com uma faixa de

Filme protetor de tela de privacidade do modo de paisagem bidirecional projetado especificamente para o View Sonic Monitor 27 (VX27764 KMHD) Ajuda a proteger os dados confidenciais, estreita

Material : A mini unidade flash é feita de material plástico, à prova d'água, à prova de poeira e à prova de choques, contendo chip à prova d'água de alta velocidade, qualidade está

1 TB DISCURSO DE REDO EXTERNAL USB Com um design impressionante de Neil Poulton A interface USB 2.0 rápida oferece taxas de conectividade e transferência de até 480 Mbps Plugue e reproduz

Alta precisão, CAT 6, ANSI / TIA568C2 Compatiante, ETL Verificado, Ethernet LAN Patch Cable, préterminado com conectores RJ45 e disponível em uma ampla variedade de cores para codificaç�

【Design de tampa deslizante】 A capa da câmera da web pode ser aberta ou fechada com apenas um toque, ele pode parar os hackers e proteger sua privacidade de ser fotografada; 【UltraThi

▲ Material : 900 D Oxford pano criptografado ▲ Dimensões : 5.14 polegadas / 15x24x8 cm ▲ Múltiplos compartimentos : 2 compartimentos grandes à esquerda e direita, 1 compartimento pe

Suporta a maioria das placas gráficas de 1, 2 e 3 slot O aço grosso impede que as GPmaiores e mais pesadas de dobrar o suporte da GPU Compatível com a maioria da placa gráfica da marca..

APLICAÇÕES : O depurador da Double Way Way Is II com 2 Road pode interface, o PC pode ser conectado a uma rede padrão por meio do barramento USB, a construção do laboratório de testes

Tensão de entrada CA : 100 ~ 240 V 50 ~ 60 Hz, saída DC : 19,5 V ~ 77 A 150 W Tamanho do conector : 4,5*3,0mm de ponta azul (Nota : Não compatível com Omen HP 200 W 19...

Microfone de streaming : projetado para o uso único de jogos e streaming de fonte sonora, a cápsula fornece a captação de voz de alta resolução enquanto suprime o ruído de fundo indes

Conector : 1 x U Conector : 1 x 67 pino m Interface : PCIE (2 ou 4 faixas) Conector : 1 X U.2 SFF 8639 Male Conector : 1 x 67 pino M.2 Chave M Slot Interface : PCIE (2 ou 4 faixas) suport

Cuidado com outras pessoas que vendem mídia inteligente usada, a menos que você queira perder todas as suas fotos! (c) 2013 Fournier Sean Cuidado com outras pessoas que vendem mídia intel

Parte compatível #‘S : 0 H0 FJ5 450 Modelo Compatível : Para Dell Inspiron 7000 15 Pl PlPacote Inclua : 1x Cabo de porta de carregamento de tomada de potência DC DC CONTA COMA COMA COMP

【Armazenamento e RAM】 Desfrute de até 15x de desempenho mais rápido do que um disco rígido tradicional com 512 GB de PCIE NVME M2 Armazenamento SSD e experiência de multitarefa melho